Mostrando 1-10 de 174 resultados
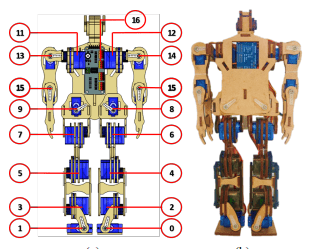
Abstract: This paper describes the mechanical design of a low-cost mini humanoid robot for the Mini Humanoid Robot Contest Intercon 2021. The objective is to provide a robot model with the appropriate characteristics to program control and locomotion applications within …
Abstract: For studying robot movements, stabilization, control strategies, it’s necessary to take into count the design and construction it. Although there are studies in the literature on developments of new robot design forms. Usually, building and implementation are expensive. Furthermore, …