Los robots estocásticos usan la aleatoriedad
Los pequeños robots de enjambre que no pueden hacer mucho por sí mismos pueden usar su comportamiento aleatorio para realizar tareas como la locomoción
La idea detrás de los robots de enjambre es reemplazar componentes discretos, costosos y frágiles de uni-tarea con un montón de robots mucho más simples, más baratos y reemplazables que pueden trabajar juntos para hacer el mismo tipo de tareas. Desafortunadamente, todos esos robots de enjambre terminan necesitando su propia informática y comunicaciones y esas cosas si quieres que hagan lo que quieres que hagan.
Un enfoque diferente para la robótica de enjambres es utilizar un enjambre de robots mucho más baratos que son mucho menos inteligentes. De hecho, es posible que no tengan que ser inteligentes, si puede confiar en sus características físicas para conducirlos. Estos enjambres son "estocásticos", lo que significa que sus movimientos se determinan al azar, pero si eres inteligente y cuidadoso, aún puedes hacer que hagan cosas específicas.
Georgia Tech ha desarrollado algunos pequeños robots de enjambre llamados "smarticles" que realmente no pueden hacer mucho por sí solos, pero una vez que los junta en una confusión, su aleatoriedad puede lograr algo.
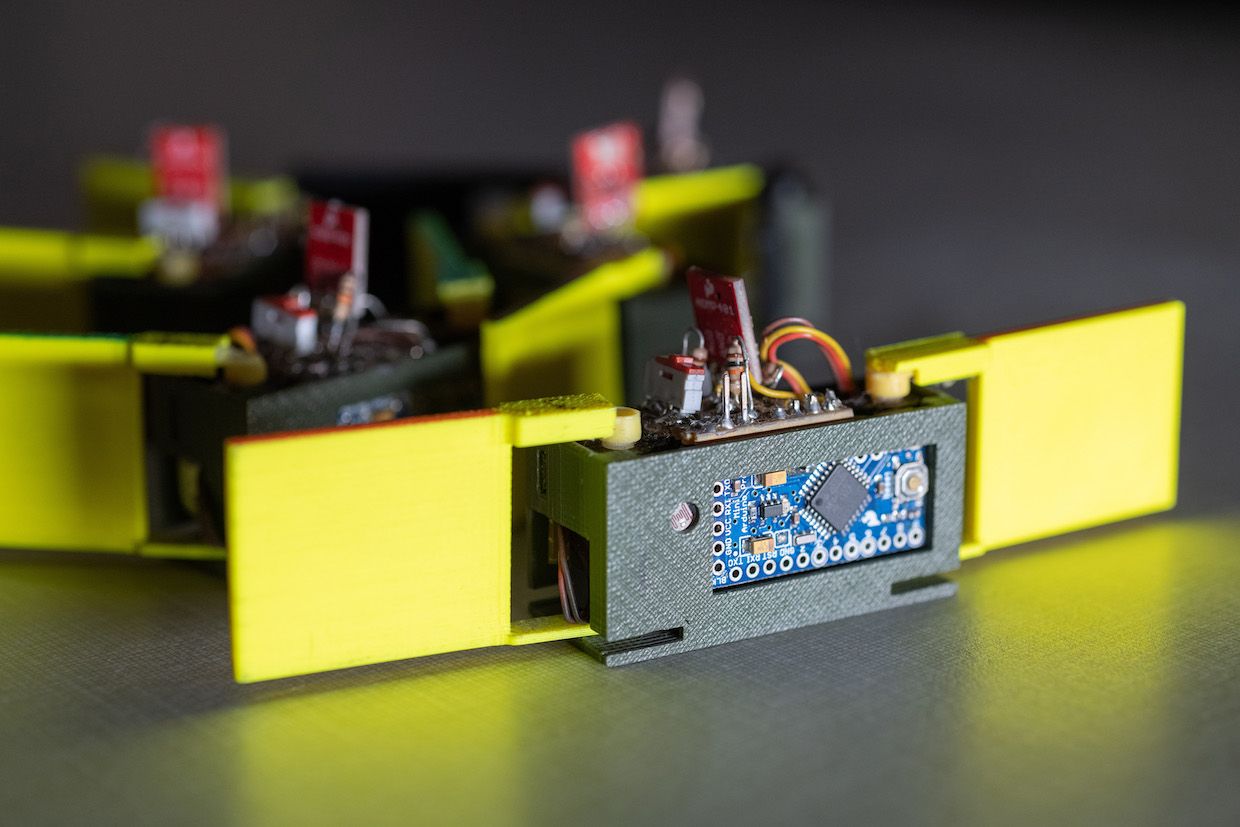
Honestamente, llamar a estos robots de partículas "inteligentes" podría darles demasiado crédito, porque en realidad son un poco tontos y, estrictamente hablando, no son capaces de todo por sí solos. Un solo smarticle pesa 35 gramos y consta de unas pequeñas aletas impresas en 3D conectadas a los servos, además de un Arduino Pro Mini, una batería y un sensor de luz o sonido. Cuando se activan sus pequeños bits de aleta, cada smarticle puede moverse ligeramente, pero uno solo se mueve principalmente en un cuadrado y luego se desplazará gradualmente en una dirección mayormente aleatoria con el tiempo.
Se vuelve más interesante cuando arrojas un montón de smarticles en un área restringida. Una pequeña colección de cinco o 10 smarticles constreñidos juntos forman una "supersmarticle", pero además de estar muy cerca unos de otros, los smarticles dentro de la supersmarticle no se comunican ni nada de eso. En lo que respecta a cada smarticle, son independientes, pero extrañamente, un montón de ellos puede trabajar juntos sin trabajar juntos.
"Estos son robots muy rudimentarios cuyo comportamiento está dominado por la mecánica y las leyes de la física", dijo Dan Goldman, profesor de la familia Dunn en la Escuela de Física del Instituto de Tecnología de Georgia.
Los investigadores notaron que si un pequeño robot dejara de moverse, quizás porque su batería se agotó, el grupo de smarticles comenzaría a moverse en la dirección de ese robot estancado. El estudiante graduado Ross Warkentin aprendió que podía controlar el movimiento agregando sensores fotográficos a los robots que detienen el aleteo del brazo cuando un fuerte haz de luz golpea a uno de ellos.
"Si inclina la linterna a la derecha, puede resaltar el robot que desea que esté inactivo, y eso hace que el anillo se tambalee hacia o lejos de él, a pesar de que no hay robots programados para moverse hacia la luz", dijo Goldman. "Eso permitió dirigir el conjunto de una manera muy rudimentaria y estocástica".
Resulta que es posible modelar este comportamiento y controlar un supersmarticle con suficiente fidelidad para conducirlo por un laberinto. Y si bien estos smarticles en particular no son tan pequeños, estrictamente hablando, la idea es desarrollar técnicas que funcionen cuando los robots se escalen hasta el punto en el que no se pueda ajustar físicamente la informática útil.
Los investigadores también están trabajando en otros conceptos, como estos:

Er, si. No estoy seguro de querer realmente que haya un robot humanoide bípedo construido con un montón de pequeños robots. Como, eso parece espeluznante de alguna manera, ¿sabes? Estoy totalmente de acuerdo con las babosas, pero no nos volvamos locos.
"Un robot hecho de robots: transporte emergente y control de un conjunto de smarticles, por William Savoie, Thomas A. Berrueta, Zachary Jackson, Ana Pervan, Ross Warkentin, Shengkai Li, Todd D. Murphey, Kurt Wiesenfeld y Daniel I. Goldman "Del Instituto de Tecnología de Georgia, aparece en la edición actual de Science Robotics .
Fuente: spectrum.ieee.org




