IROS 2023: Aplicación de Deep Learning en la Teleoperación de un Humanoide
IROS es un foro gigante e impactante para la comunidad internacional de investigación en robótica, destinado a explorar la vanguardia de la ciencia y tecnología en robots inteligentes y máquinas inteligentes, haciendo hincapié en las direcciones futuras y los enfoques, diseños y resultados más recientes.
IROS 2023 se realizó del 1 al 5 de octubre de 2023 en Huntington Place en Detroit, Michigan, EE. UU .El evento abordó “La Próxima Generación de Robótica”, por lo que la conferencia tiene como objetivo destacar especialmente las contribuciones de los investigadores más jóvenes y ayudar a acelerar las futuras contribuciones de todos aquellos que recién se están adentrando en el campo. Esto se reflejó en charlas plenarias y magistrales, talleres, tutoriales, foros, competencias, exposiciones, recorridos y sesiones técnicas.
Dentro de todos los papers de investigación presentados en la conferencia, hemos seleccionado el tema
“Development of a Whole-Body Work Imitation Learning System by a Biped and Bi-Armed Humanoid”
En el paper se habla sobre el aprendizaje por imitación, el cual ha sido objeto de un activo estudio en los últimos años. En particular, se ha logrado la adquisición de habilidades por parte de un robot con un cuerpo fijo, cuya posición, postura y ángulo de visión de la cámara permanecen inalterados en numerosos casos. No obstante, la imitación del comportamiento de robots con segmentos móviles, como los humanoides, sigue siendo un desafío considerable.
En este estudio, se desarrolló un sistema de aprendizaje por imitación utilizando un robot bípedo con segmentos móviles. Se identificaron dos problemas principales en el proceso de desarrollo del sistema. En primer lugar, se abordó la necesidad de un dispositivo de teleoperación diseñado específicamente para humanoides. En segundo lugar, se desarrolló un sistema de control capaz de soportar cargas de trabajo elevadas y de realizar la recopilación de datos a largo plazo.
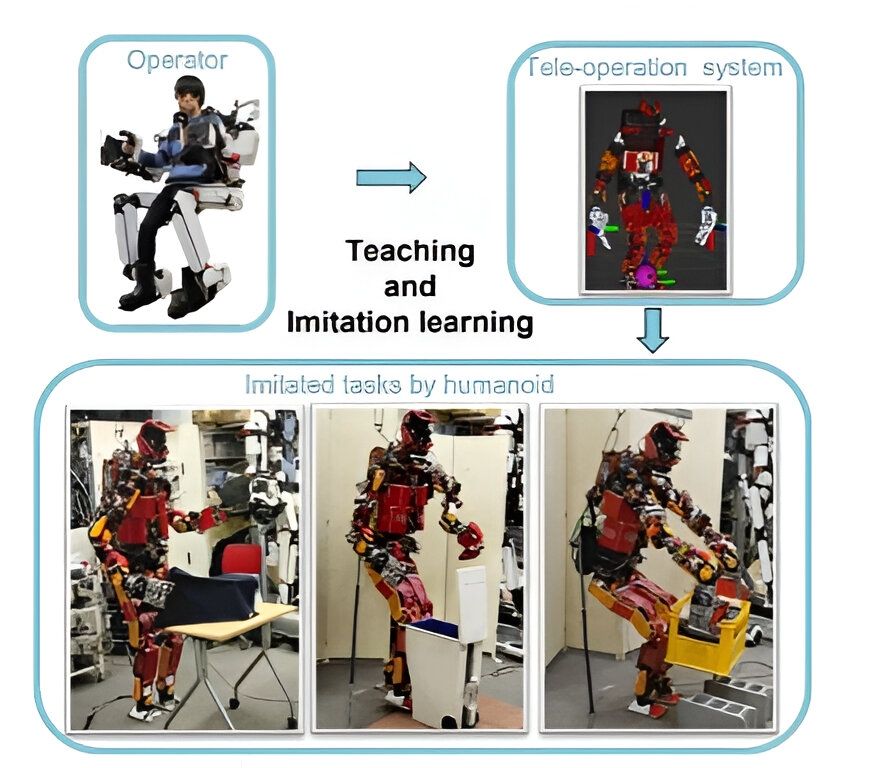
Para abordar el primer desafío, se implementó el dispositivo de control de cuerpo completo TABLIS. Este dispositivo no solo es capaz de controlar los brazos, sino también las piernas, permitiendo un control bilateral del robot. Al conectar este sistema con el robot humanoide de alta potencia JAXON, se estableció un sistema de control para el aprendizaje por imitación.
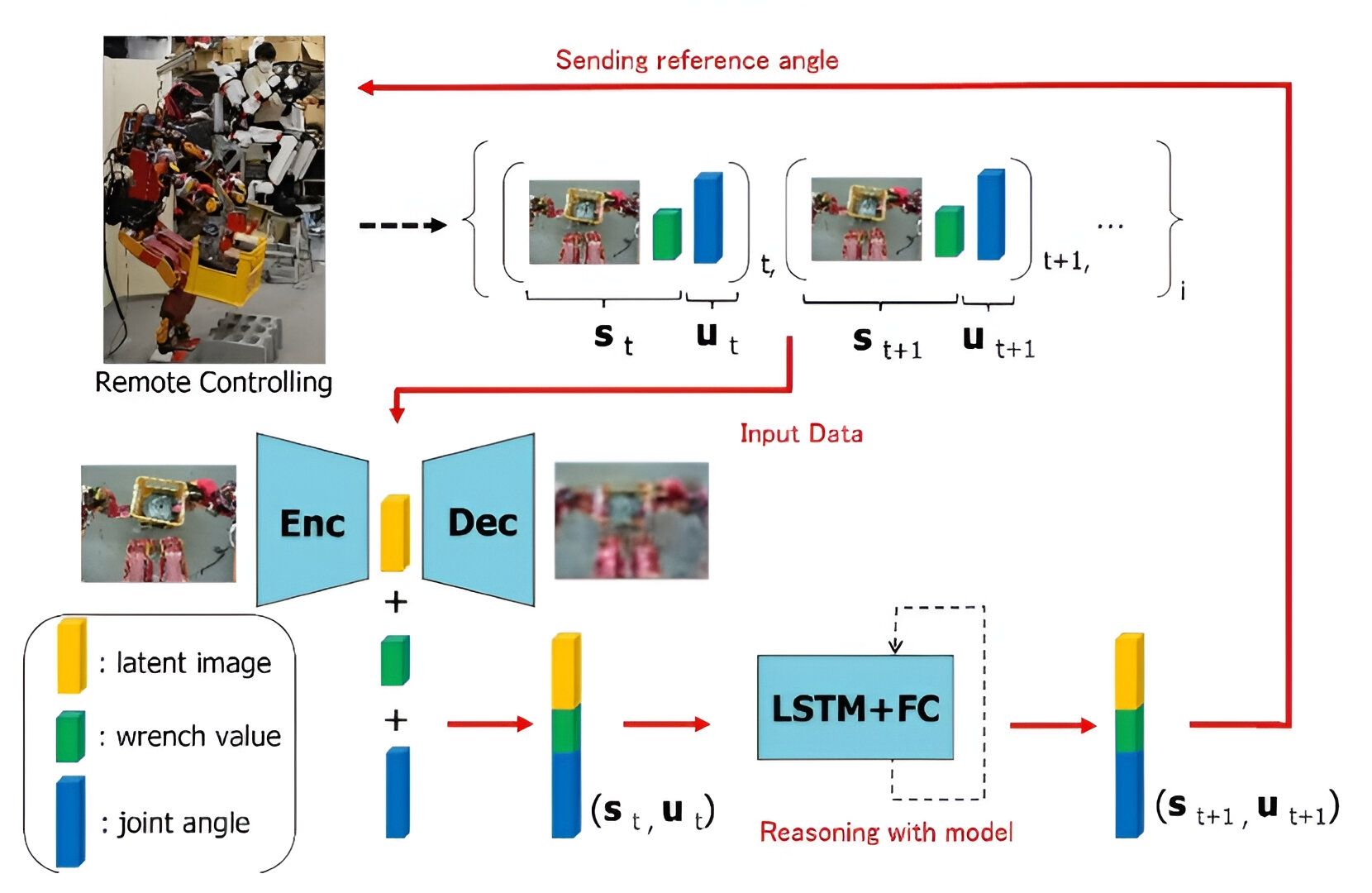
En relación al segundo desafío, se creó un sistema capaz de recopilar datos a largo plazo basados en la optimización de la postura, mientras simultáneamente se movían las extremidades del robot. Se aplicaron técnicas de generación de posturas de alto ciclo en combinación con métodos de optimización de postura, que incluyen la minimización de torque en articulaciones de cuerpo completo y la optimización de fuerza de contacto.
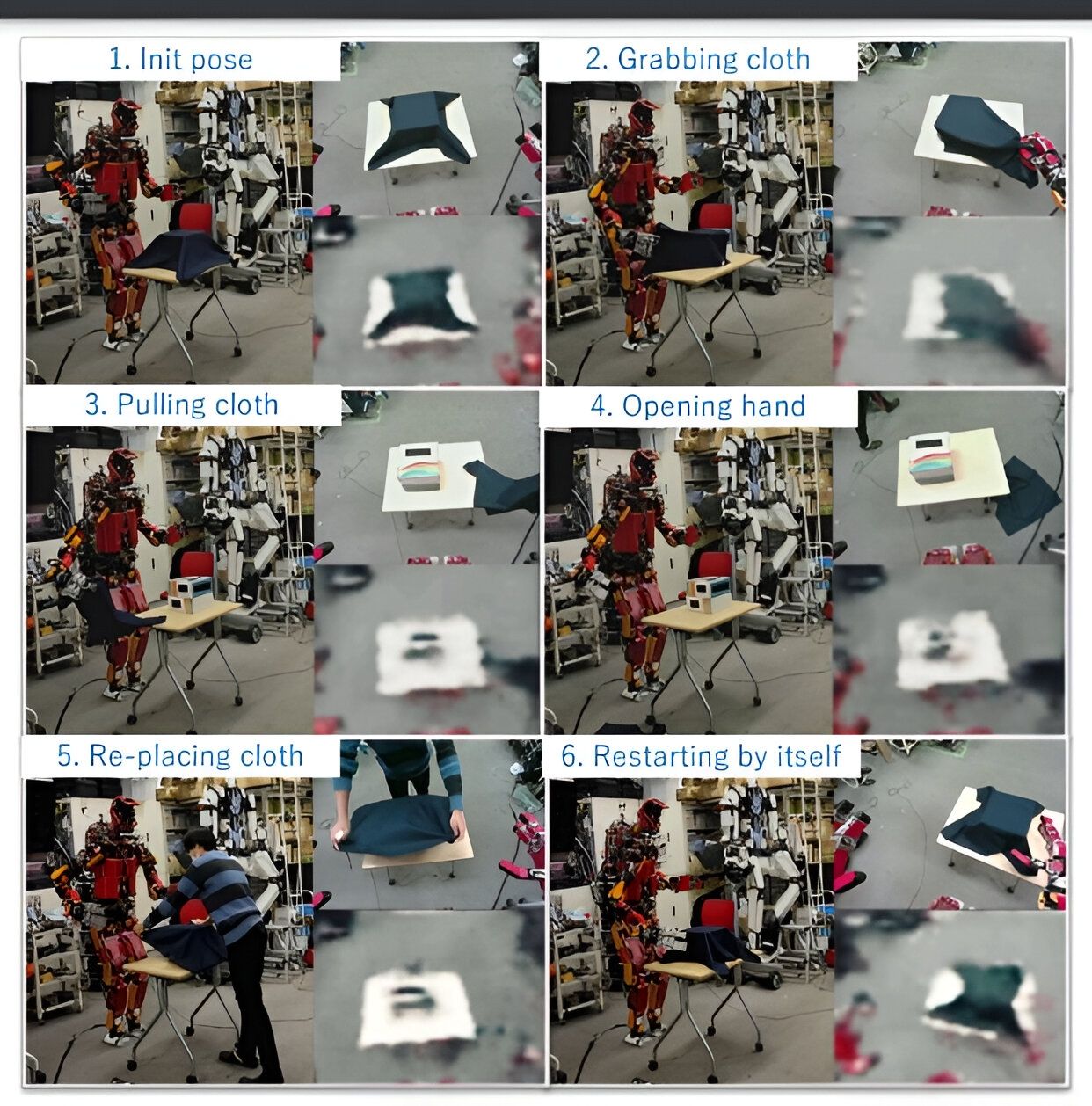
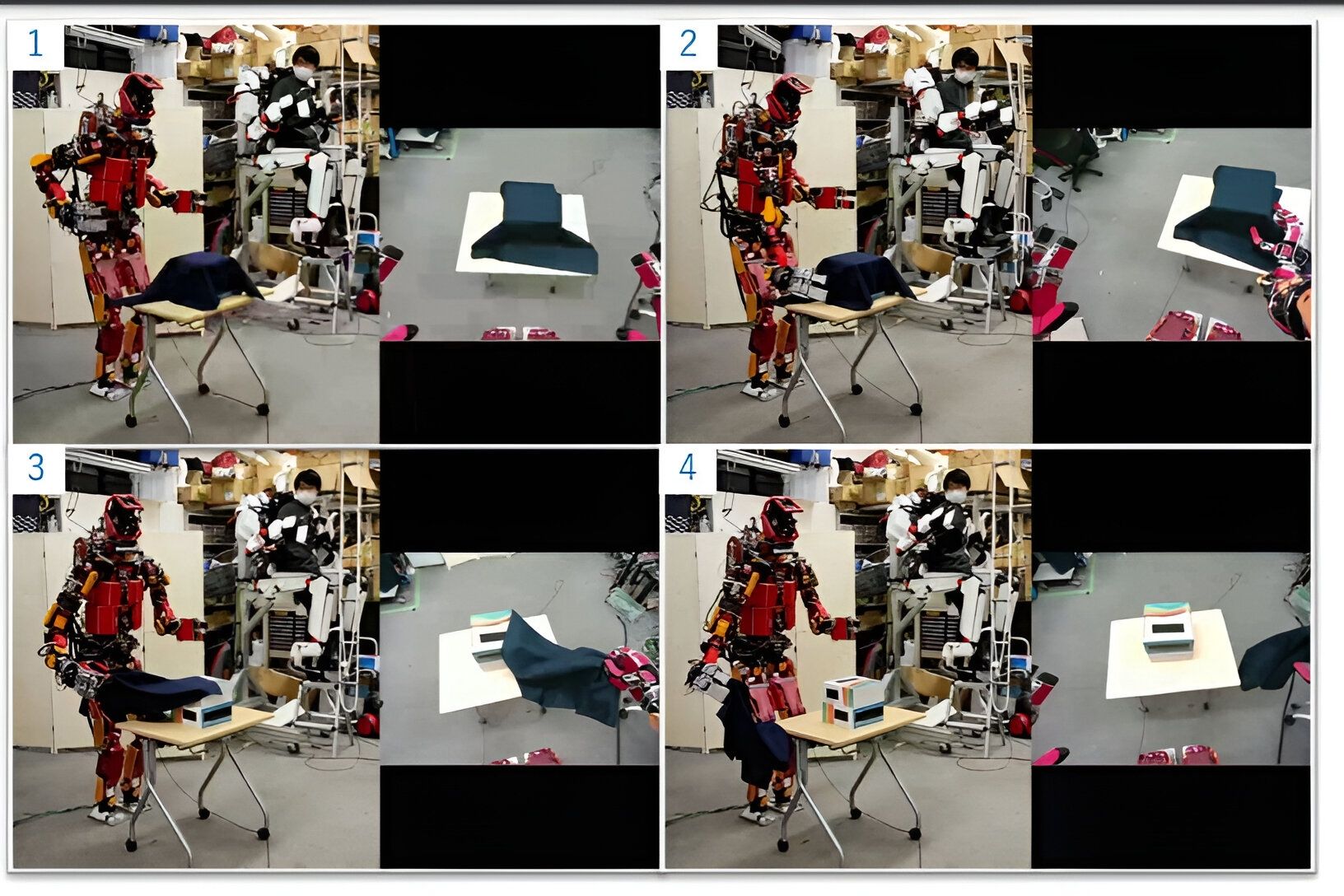
El diseño integrado de este sistema, que combina ambas características mencionadas anteriormente, permitió abordar diversas tareas mediante el aprendizaje por imitación. Finalmente, se demostró la efectividad de este sistema a través de una serie de experimentos que involucraron la manipulación de telas flexibles, con movimientos simultáneos de manos, cabeza y cintura, así como la manipulación de objetos utilizando las piernas características de los humanoides, incluyendo el levantamiento de objetos pesados que requieren gran esfuerzo.
¿Cuál es el propósito de esta investigación?
Este estudio tuvo como objetivo el desarrollo de un sistema de aprendizaje por imitación utilizando un robot bípedo con un segmento móvil. Con este propósito, se diseñó un sistema de teleoperación que conecta un dispositivo de maniobras de cuerpo completo bilateral y un robot humanoide de alta resistencia. Se implementó un método de generación de posturas optimizado para torque y fuerza de contacto, permitiendo que el sistema sea capaz de soportar largas sesiones de recopilación de datos. A través de este sistema, se logró replicar exitosamente la manipulación de telas flexibles, la manipulación de objetos con los pies y el levantamiento de objetos pesados, situaciones en las que el cambio de postura del componente base y el desplazamiento del centro de gravedad resultan fundamentales.
Fuente: irosondemand.org
