El robot insecto que puede sobrevivir al matamoscas

Los investigadores de EPFL han desarrollado un insecto robótico que utiliza músculos blandos artificiales llamados actuadores de elastómero dieléctrico para conducir pequeños pies que impulsan al pequeño robot a una velocidad respetable. Y dado que todo es blando y ya casi plano, puede golpearlo repetidamente contra el suelo con un matamoscas, y luego despegarlo y verlo comenzar a correr nuevamente. Prepárate para uno de los videos de abuso de robots más brutales que hayas visto. #niunrobotmenos
Estamos obligados a señalar que la versión del robot que sobrevive al ataque con el matamoscas es una versión atada , no la versión autónoma con la batería y el microcontrolador y los sensores, que podrían no reaccionar tan bien a los golpes repetidos. Pero aún así, es genial ver que se despega de inmediato y continúa, y los investigadores dicen que han podido hacer este aplastamiento ocho veces seguidas sin destruir el robot.
Alimentado por actuadores de elastómero dieléctrico
Una de las cosas difíciles de construir robots como estos (que dependen de una actuación de muy alta velocidad) es la potencia: los niveles de potencia en sí mismos generalmente son bajos, en el rango de milivatios, pero los actuadores generalmente requieren varios kilovoltios para funcionar, lo que significa que necesita una gran cantidad de componentes electrónicos que pueden aumentar el voltaje de la batería hasta algo que pueda usar. Incluso los sistemas de energía miniaturizados están en decenas de gramos, lo que obviamente no es práctico para un robot que pesa un gramo o menos. Actuadores de elastómero dieléctrico, o DEA, no son una excepción a esto, por lo que los investigadores utilizaron una pila de DEA que podrían funcionar a un voltaje significativamente más bajo llamados LVSDEAs (tú sabes como les gusta poner iniciales a todo). Estos DEA funcionan a solo 450 voltios, pero realizan ciclos de hasta 600 hertzios, utilizando electrónica de potencia que pesa solo 780 miligramos.
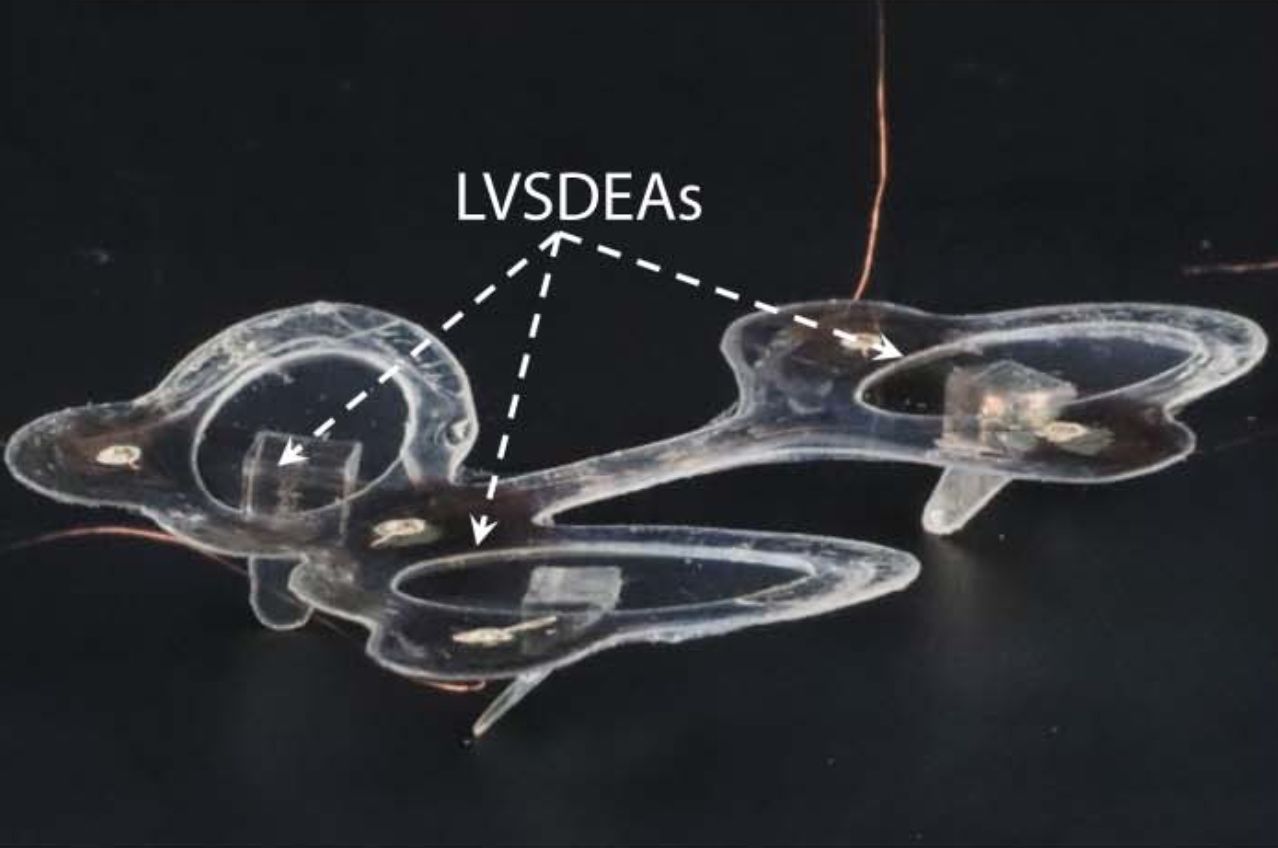
La actuación de LVSDEA se convierte en movimiento mediante el uso de patas flexibles en ángulo, similar a una cerda (no al chanchito, sino a la cerda de un cepillo). Una pata en cada lado permite que el robot gire alrededor de una tercera pata de apoyo en el frente. La velocidad máxima del robot atado de 190 mg es de 18 mm / s (0.5 longitudes de cuerpo / s), mientras que la versión autónoma con una carga útil de 800 g de baterías y componentes electrónicos y sensores podría moverse a 12 mm / s durante 14 minutos antes quedando sin jugo. Curiosamente, endurecer la estructura del robot sosteniéndolo en forma curva con un trozo de cinta aumentó significativamente su rendimiento, casi duplicando su velocidad a 30 mm / s (0,85 longitudes del cuerpo / s) y aumentando su capacidad de carga útil también.
Lo que todos estamos esperando, por supuesto, es un robot blando que pueda ser aplastado y sin ataduras al mismo tiempo. Este es siempre el problema con los robots blandos: casi siempre son en su mayoría blandos y requieren alimentación externa o componentes rígidos en forma de componentes electrónicos o baterías. Los investigadores de la EPFL dicen que "están trabajando actualmente en una versión sin ataduras y completamente suave" en asociación con Stanford, lo cual estaremos a la expectativa.
Fuente: spectrum.ieee.org




